 设计的置入深度。
设计的置入深度。
根据以上标准制定激光照射热电偶表面产生阶跃温度信号的指标为: 阶跃温度激光器持续输出时间阶跃温度上升时间阶跃信号稳定后温度变化不大于温度阶跃的。
依据给定的要求,控制对象的传递函数选择为,其中,调节时间,阶跃输入为方便测试选择为单位阶跃,进入稳态后与原来的响应差距不超过±1%。
在过程控制中,按偏差的比例(P)、积分(I)和微分(D)进行控制的PID控制器是应用最为广泛的一种自动控制器。它具有原理简单、易于实现、适用面广、控制参数相互独立、参数的选定比较简单等优点。现以为例,根据PID参数整定方法得到PID参数可以分别取,在此参数基础上可以构造PID控制器[3]。但PID控制在控制精度、抗干扰性和魯棒性效果上一般,为此需要更好的控制算法。
1 Tornambe控制器设计
近年意大利人Tornambe在解决复杂电网控制中提出一种新的控制方法,其思想是基于实时估计补偿,实现动态系统的反馈线性化的非线性控制[4⁃5]。
单变量非线性数学模型可以表示为:
(1)
对于式(1)的系统,假设相对阶已知且输出及可测,则有微分变换; 将式(1)化为式(2)如下:
(2)
式中:;;,和可由,,和微分变换函数得到。
假设上述系统满足动态渐进稳定,即是动态稳定的,则系统的动力学方程可选取为:
(3)
式中,为系统的动力学参数,要保证系统的稳定性要求,参数的选取应满足系统的闭环极点位于s的开左半平面,即特征方程的根位于s的开左半平面[6]。
假设系统的扩张状态定义为:
(4)
则上述系统动态性能的方程可以描述为。如果系统状态变量函数和均可测,则可以采用精确反馈线性化方法设计反馈环节将抵消掉,就可以实现系统的线性化[7⁃9]。
(5)
但是考虑到在实际系统中,由于内扰和外扰的存在,状态变量和常常未知或不能精确已知,因此导致了控制性能的下降。为了消除和补偿系统内部外部存在的不确定性因素,采用包含积分环节的代替式(4)中的,采用高性能的扩张状态观测器[10],对系统内部包含的动态非线性、模型不确定性及外部扰动等不确定的总体扰动的扩张状态给予估计和补偿。Tornambe控制器设计如下:
(6) 式中:为任意常数,,为一待选的正数,系统稳定与否取决于选取是否得当;为任意常数,但系统的动态性能会受到的影响。
由李雅普诺夫第二稳定判据证明,如果存在常数,当满足时,Tornambe控制器式(6)与被控对象式(2)所构成的闭环系统满足渐进稳定。
取可得到一阶Tornambe控制器的控制规律为:
式中:为系统输出;为系统给定;为扩张状态观测器,用以实时估计和补偿不确定动态和未知非线性;为中间变量;为可调预期动力学参数,它决定系统的响应速度;为可调参数,它决定系统的性能鲁棒性。
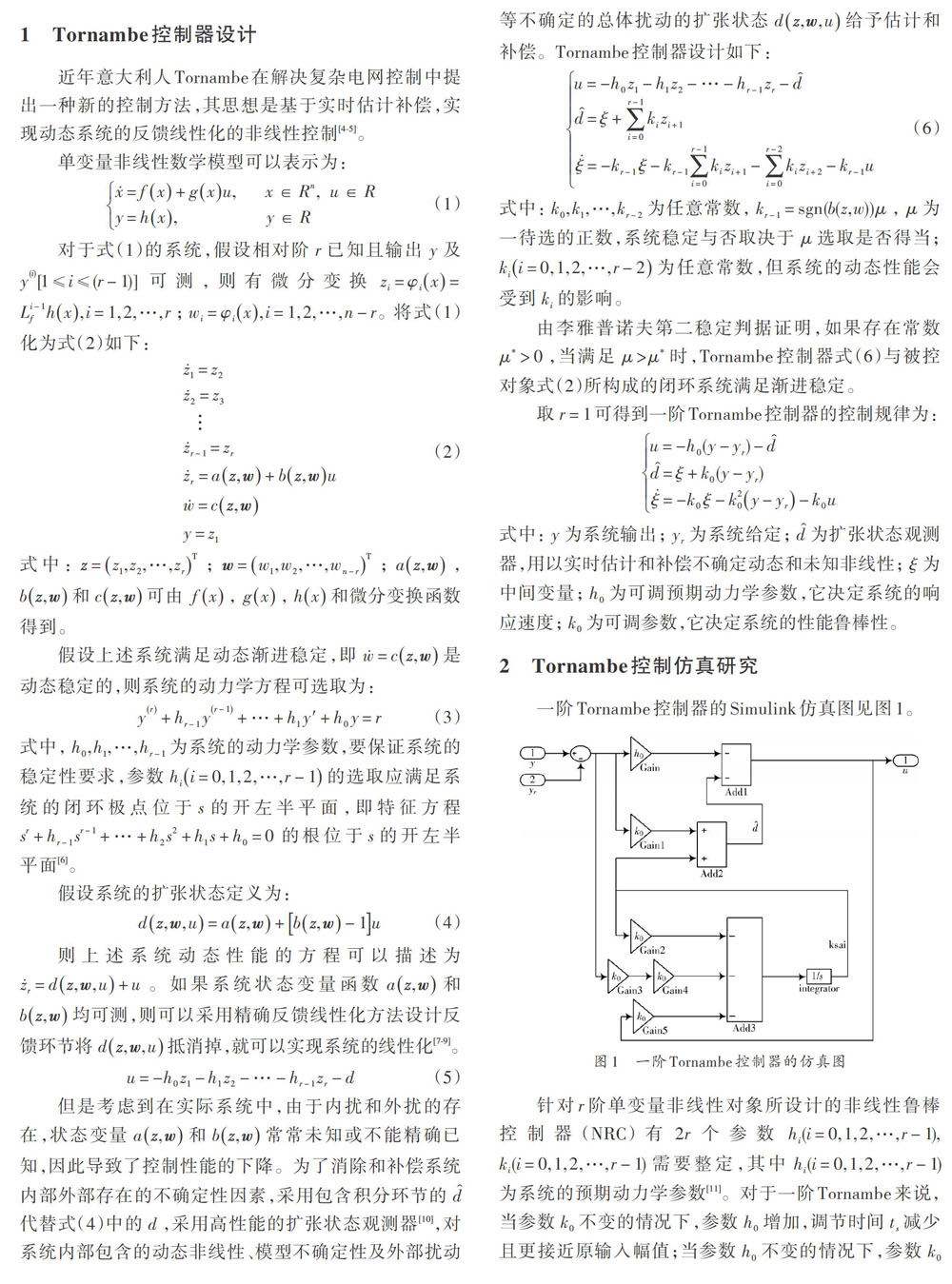
2 Tornambe控制仿真研究
一阶Tornambe控制器的Simulink仿真图见图1。
针对r阶单变量非线性对象所设计的非线性鲁棒控制器(NRC)有2r个参数需要整定,其中为系统的预期动力学参数[11]。对于一阶Tornambe来说,当参数不变的情况下,参数增加,调节时间减少且更接近原输入幅值;当参数不变的情况下,参数增加,系统的鲁棒性降低。故在满足原来的动态性能要求与简便性下根据经验选择参数为。
Simulink中提供了Signal Constraint模块用于对某处信号的约束,可以按照约束条件优化非线性控制系统中的参数,使得满足控制要求[12]。PID控制器和Tornambe控制器在Simulink下的仿真图如图2所示。
在Matlab对话框中输入经过Signal Constraint模块优化后得到结果为
3 仿真结果比较
3.1 精度和抗干扰性比较
图3中加入的干扰信号是在延时起振的脉冲信号,仿真得到的PID控制器和Tornambe控制器的示波器结果如图3所示。
结果表明:虽然PID控制和Tornambe控制都可以达到预定的控制目标,但Tornambe控制的精度更高;而且在加入一干扰信号后,Tornambe控制器再次达到稳定的时间要比PID控制的更加迅速,Tornambe的抗干扰性优于PID控制
3.2 鲁棒性比较研究
为研究性能鲁棒性的对比问题[13],控制对象的参数摄动可以认为是控制对象发生了“突变”。以为主导极点追加另一极点,重新构造的控制对象的传递函数为。Simulink连线仿真图如图4所示,仿真结果如图5所示。
图5中实线为Tornambe控制器的效果,结果表明:在受控对象参数发生大幅变化时,且在不改变控制器参数的情形下,Tornambe控制速度和效果要比PID控制迅速,即Tornambe控制的鲁棒性优于PID控制。
4 结 语
针对激光器功率反馈控制问题,PID控制和Tornambe控制这两种方法均可达到指标要求。但进行比较后发现,Tornambe克服了PID控制中结构参数变化时,最优的控制参数需要动态整定问题。此外,该方法可以转化为具有与传统PID非常相近的简单结构,易于为工程人员掌握,适合推广使用等优越性。越是复杂的系统,越是有很多无法建模的结构和因素,Tornambe控制和PID控制器的控制效果反差越大,其优越性会体现的更加明显。
参考文献
[1] 黄亮,郝晓剑,周汉昌.热电偶时间常数测试技术研究[J].传感器世界,2006(9):16⁃18.
[2] 滕士雷,孔喜梅.基于阶跃温度响应的热电偶时间常数测试系统[J].中国测试,2011(1):24⁃27.
[3] 金奇,邓志杰.PID控制原理及参数整定方法[J].重庆理工大学学报(自然科学版),2008(5):91⁃94.
[4] TORNAMBE A. Global output tracking of polynomial reference signals for a class of single⁃input single⁃output nonlinear systems [J]. IEE proceedings D: control theory and applications, 1993, 140(2): 93⁃98.
[5] TORNAMBE A. Global regulation of a planar robot arm striking a surface [J]. IEEE transaction on automatic control, 1996, 41(10): 1517⁃1521.
[6] 任一峰,李娜,王晋军.相对阶状态反馈补偿控制器研究及设计[J].中北大学学报(自然科学版),2015(6):656⁃660.
[7] 张智焕,王树青,荣冈.基于精确线性化的MIMO双线性系统预测函数控制[J].控制理论与应用,2003(3):477⁃480.
[8] 寧海春,赵长安,赵松,等.具有干扰非线性系统精确线性化[J].哈尔滨工业大学学报,1999(2):33⁃35.
[9] 韩志涛,井元伟,段晓东,等.一般非线性系统的相关阶与线性化[J].控制与决策,2006(9):1065⁃1067.
[10] 杨明,董晨,王松艳,等.基于有限时间输出反馈的线性扩张状态观测器[J].自动化学报,2015(1):59⁃66.
[11] 徐益,李东海,老大中,等.基于Monte⁃Carlo实验的NRC参数整定规律研究[J].系统仿真学报,2008(10):2666⁃2673.
[12] 孙庆克,顾伟,褚建新,等.基于Matlab/Signal Constraint工具箱的电动振动台的研究[J].计算技术与自动化,2015(2):38⁃41.
[13] 李强,李东海,谭文.自抗扰控制与广义预测控制的性能鲁棒性比较研究[C]//第三十一届中国控制会议论文集.合肥:中国自动化学会控制理论专业委员会,2012:186⁃189.